
Cruise Automation, the autonomous vehicle startup owned by a big bank and GM, along with help from Honda, seems to have a gift for hyperbole. In a tweet, the company suggested that they were aiming for their new autonomous shared ride van to have the same sort of impact as the “compass, train, car, light bulb, radio, internet, computer, and mobile phone,” which is, of course, eye-rollingly ridiculous. Still, the vehicle they unveiled yesterday, the Origin, is a significant step in the progress of AVs. It’s not revolutionary, but more evolutionary, and there are still many, many questions to be answered.
First, let’s talk about what the Cruise Origin is: an autonomous, four-passenger shuttle bus. The introduction gives a good overview of the car:
While they breathlessly talk about how astounding and revolutionary the design is, the truth is that this is possibly the most expected design for an autonomous vehicle. That’s not an insult, it’s because, for the job this thing is expected to do, a big box on wheels makes the most sense.
This has been understood for a while; Olli’s big box on wheels was first shown back in 2016 and is designed to do very similar people-moving sorts of things as the Origin, Canoo’s new EV van, while not currently autonomous, uses this design, partially because they do have future autonomy plans, and I can even think of a book out there that talks about the “room on wheels” AV concept in detail.

So, while it’s nice everyone at Cruise is excited, this is hardly a revolutionary AV design. Again, I want to be clear that I don’t mean this dismissively—this is the best design for such a vehicle and its intended job, though I wonder if the four-seat limitation may be a little low.
Technically, it looks to be a near-standard EV design with a powered “skateboard” that houses the batteries, and most of the hardware at the ends. Suspension seems to be MacPherson struts in front, multi-link at the rear, a beefier variant of what’s used on something like the Chevy Bolt.
Here are my best guesses at the interior packaging and layout of the Origin:
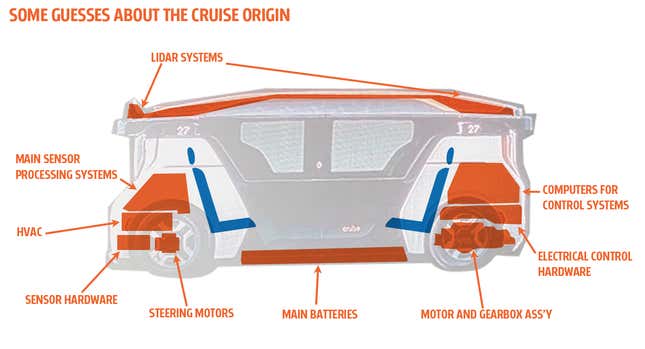
Front is facing left, by the way, making it rear-motored. I think.
I have a lot of questions about the Origin, a lot having to do with exactly how autonomous it is. On the SAE scale of autonomy, where Level 1 is any old conventional car, Level 2 is the semi-autonomy of something like Tesla Autopilot or GM’s SuperCruise (also the highest level you can actually buy today), and 5 is fully, completely autonomous, where does the Origin fit?
I asked Cruise this and many other questions. Here are the answers I got, in bold:
What level of autonomy would it be classified as?
- We don’t talk about our technology in terms of SAE levels.
Is it geo-fenced in any way?
- Nothing more to share on this topic at the moment other than to remind that we currently test in the entire 7x7 of the city of San Francisco.
Will it be designed to run on set routes, or is it free to pick its own routes and paths?
- It’s designed to operate just like traditional rideshare, only safer, with more space, and a more consistent experience.
What sort of failover behaviors does it have in case of a sensor fault, etc?
- Fully redundant systems on everything from sensors to computers.
What is the maximum speed it will operate?
- Highway speeds.
Will it go on highways as well as city streets?
- It will have the capability to go on highways as well as city streets.
What sorts of records does it store about its trips, and where does that information go?
- Nothing more to share on this topic at the moment.
Can these be remotely piloted?
- Nothing more to share on this topic at the moment.
Aside from your own ride-sharing programs, where would these be deployed? Airports, campuses, etc?
- Our current plan is to start in cities and expand from there.
Okay, so, there’s some good information here, but a lot of questions as well. Their refusal to use the SAE levels is puzzling, but I suspect that’s because their system may operate in multiple modes, and they don’t want to get classified in something lower than what they feel they should.
If I had to guess, I’d think it’s likely somewhere between Level 3 and Level 4—pretty impressive, but I do not believe it’s full Level 5. And I would not be surprised to find that it can only achieve optimal results in a geo-fenced area, even if that area is as large as the city of San Francisco.
When pressed about the level of autonomy, Cruise added:
“We view in terms of scale–by scale, we mean you can and will want to use our self-driving car service to go anywhere, at any time. It’s why our testing occurs primarily in complex, urban environments that are more than 40 times more challenging than a simple suburban setting. If we can safely deploy at scale in the most complex environments, we can quickly expand everywhere else.”
It’s hard to determine exactly what this really means—what’s the basis for that “40 times more challenging” number? Hopefully, we’ll learn more soon.
I’m very curious to see how this turns out; in addition to ride-sharing, there’s a lot of delivery potential use as well. If Cruise can actually manage to get over the considerable legal and technical hurdles to get as many of these things deployed as they want, we should learn a lot about how AVs will actually work in the world, and how people will interact with them.
Nothing Cruise is doing is unexpected or absolutely revolutionary, as the vehicle and the use cases behind it have been considered and planned for years now. But, they could be the first to actually put these ideas into practice, and, if they do, that actually is a very big deal.