Tests Show All Driver Assist Systems Can Be Fooled, Not Just Tesla
Of course, that doesn't mean Tesla's Autopilot safeguards are good; Car and Driver's tests show none of them are
In a series of tests conducted by our pals over at Car and Driver, it was demonstrated that the Level 2 driver-assist, semi-automated systems used by pretty much all major carmakers are able to be fooled to allow a driver to be completely inattentive, even to the point of leaving the driver's seat. This is, of course, bad if not terribly surprising news, and is really another reminder that all Level 2 driver-assist systems are inherently flawed.
Previously, we've mostly covered how Tesla's Autopilot driver monitoring systems (primarily a torque sensor in the steering wheel) can be defeated, and various examples of noted idiots taking advantage of these system cheats to be dumb at high speeds on public roads. Tesla has been by far the best-known and most visible example of this problem, but it's by no means alone.
We've had this quote from robotics and human-machine automation researcher Missy Cummings in articles before, and it applies not just to Tesla, but any carmaker using steering wheel torque sensors as a means to decide if the driver is paying attention:
"The takeaway is torque monitoring on the driving wheel is terrible and should be outlawed that should not happen at all...we should never use that as a proxy for driver monitoring."
Any system that relies on steering wheel torque monitoring can be defeated with a weight on the wheel. The Car and Driver tests prove this. What's even more interesting is that their tests also showed just how many cars don't bother to check if there's anyone actually occupying the driver's seat: all 17 vehicles in the tests allowed this.
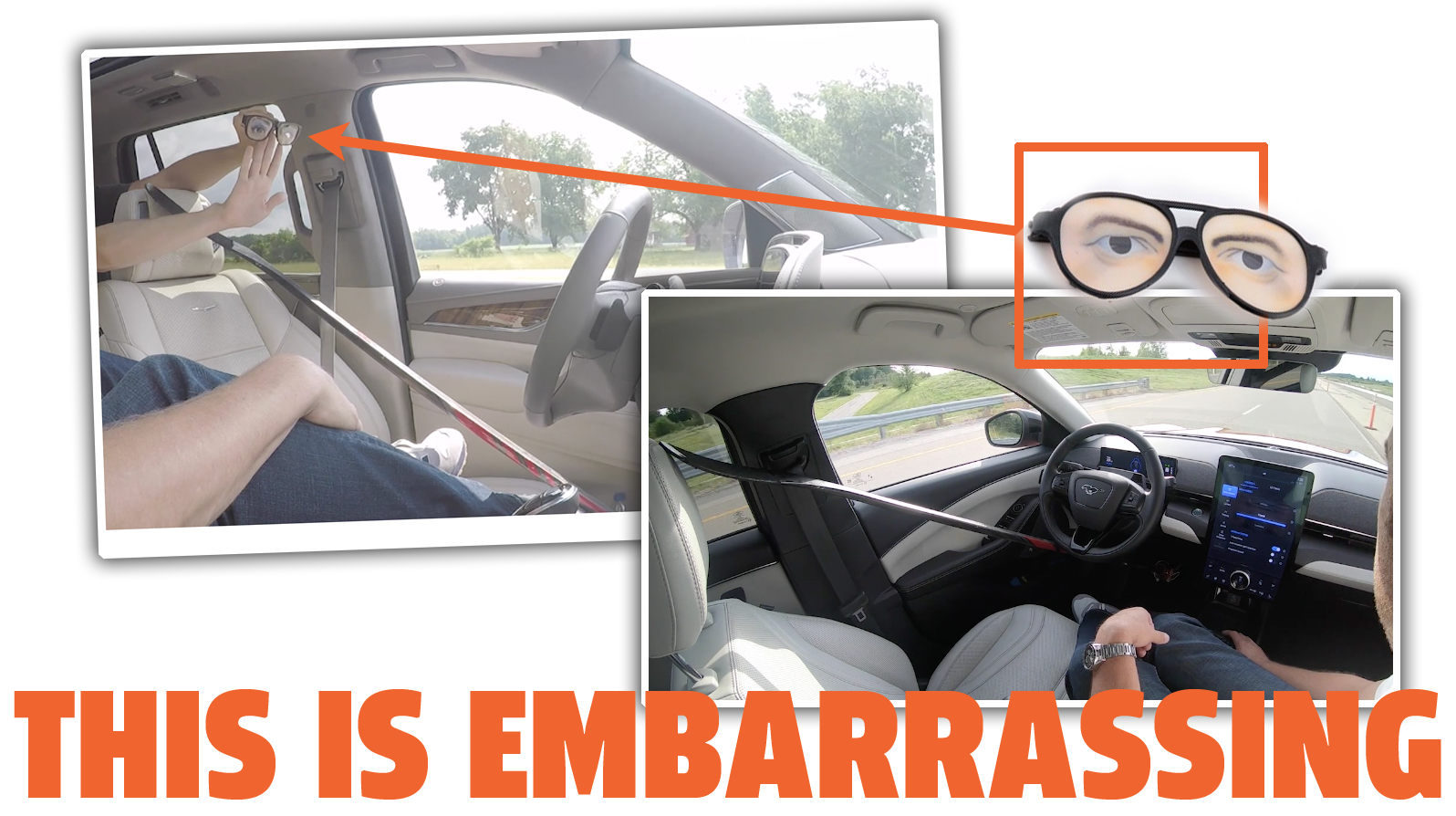
What I was most surprised to see was how easily and comically GM's driver-facing camera system was to fool. C&D did it with a pair of back-of-a-comic-book novelty glasses with eyeballs printed on them:
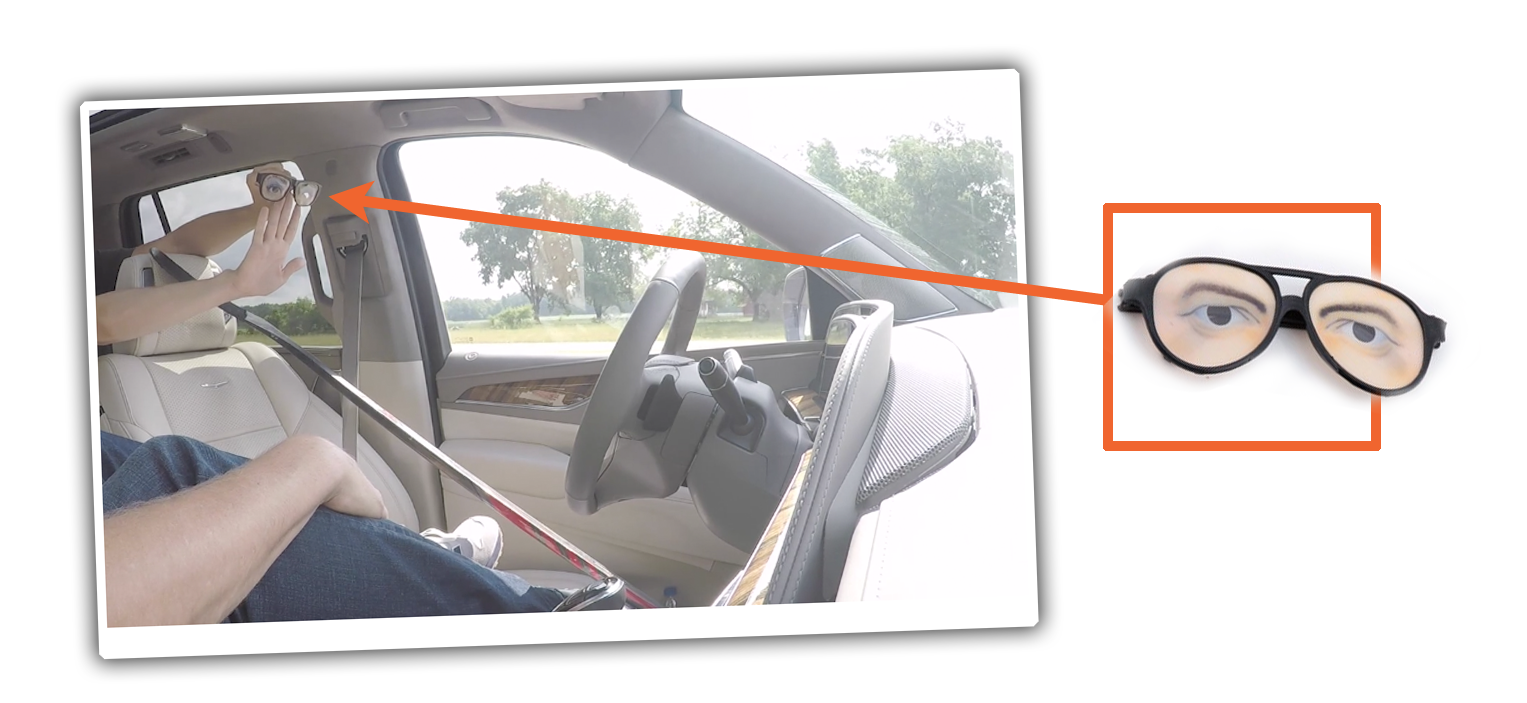
Granted, this is a bit more work than a weight on the steering wheel, but it's not that much more work. While it's comical, it's still alarming.
Here, watch their whole video:
It would be a mistake to take any of this as some exoneration of Tesla, because it's very much not. This is just proof that the entire industry has a long way to go driver-monitoring-wise, and, I think the bigger takeaway is the point I've been hammering at for years now: Level 2 is garbage.
Any semi-automated system that is, at various times, doing about 80% or more of the driving task yet still requires the driver to be alert, monitoring the situation, and ready to take over with minimal to no notice is doomed to failure and abuse.
Humans just don't work that way when it comes to vigilance tasks, and we've known this for decades. Plus, the solutions that various carmakers employ to deal with a non-responsive driver are woefully, even dangerously inadequate.
Current systems either cut off all automated functions, which could introduce far more problems, or slow to a stop in whatever lane they happen to be in, which can be extremely dangerous, too.
Yes, driver monitoring systems are inadequate across the board, but the truth is that resources spent attempting to develop a fool- and tamper-proof system would really be better spent pushing to at least Level 3 systems that could, at minimum, get a car out of an active traffic lane and parked somewhere out of the way as soon as possible when an inattentive driver is detected.
This is a hard problem to solve, but unless we all decide that these easily-defeated driver monitoring systems are somehow fine (again, they're not) it's really the only reasonable path. We have to stop expecting humans to be both not driving and yet driving concurrently. That just doesn't work.
So, Tesla-stans, if it makes you feel better about all the negative attention that comes your way when morons defeat inadequate driver-monitoring systems, then enjoy the fact that you do not — and, really, never have — sucked alone.
All these Level 2 systems suck. Enjoy the togetherness, and maybe we can use it as a way to start talking about building something better.