Mercedes-Benz' Claims To Have Level 3 Automated Driving But There's Still A Huge Problem
The problem may be with the definition of Level 3 itself, which just isn't good enough

Mercedes-Benz must have held some sort of event—our invitation got lost in the mail, I guess—that put some journalists behind the wheel of their new 2022 Mercedes-Benz EQS, with its Drive Pilot semi-automated driving system, which they're claiming is Level 3. This level means the driver doesn't have to pay attention when the car is in control, but still needs to be ready to take over if requested. There are all kinds of problems with this, so let's break it all down while I'm still nice and worked up about it.
First, I'll say that the 2022 Mercedes-Benz EQS is impressive-seeming: a sleek, premium EV with 630 horsepower and up to 478 miles of range. It certainly looks like a capable Tesla Model S competitor, and that goes for its semi-automated driving features, which include lidar sensors with self-cleaning systems.
The hardware for Drive Pilot looks impressive, with the lidar and a very high-resolution GPS system that accounts for continental drift, and driver-facing cameras to make sure the person in the driver's seat is still there and awake, all that.
Plus, I also like Mercedes-Benz' careful approach to how they're implementing Drive Pilot; its first use case will be limited to annoying, low-speed stop-and-go traffic situations, which is one of the two cases I picked as being actually needed for most people's autonomous driving needs.

Currently, the system is limited to 37 mph, which mitigates a lot of issues, but Mercedes does seem to leave open the possibility of higher-speed semi-automated highway driving, as their basic description does not specify a speed limit:
DRIVE PILOT is designed to operate the vehicle under certain conditions on fully access-controlled highways, such as Interstate Freeways. Under these conditions, the driver can engage DRIVE PILOT to operate the vehicle and afterward relax and focus on non-driving tasks provided by the vehicle's multimedia system. When it's time to leave the freeway, or if an unusual situation develops, such as approaching a crash scene or the occurrence of a malfunction, DRIVE PILOT will alert the user to resume driving, while maintaining vehicle control until the user is able to do so.
Now, my problem with Drive Pilot's Level 3 implementation is very similar to my problems with Level 2 semi-automation: humans aren't good at having to take over a task like driving from a machine that has been doing most of the work.
Level 2 at least comes with the expectation that you will always be alert and ready to take over, even though people time and time again have proven that they can't be relied on for that.
Level 3 is potentially even worse, because at this level, the car is capable of driving without any required attention from the driver—as in, hands off the wheel, reading or playing games is okay, even though it still may demand the driver to take over with minimal to no warning.
Now, I had always thought that when carmakers would deploy Level 3 systems, the change would entail some sort of robust failover so that in a situation where the driver cannot be roused, the car would be at the very least able to get out of the way of other cars on the road.
That's doesn't seem to be the case here.
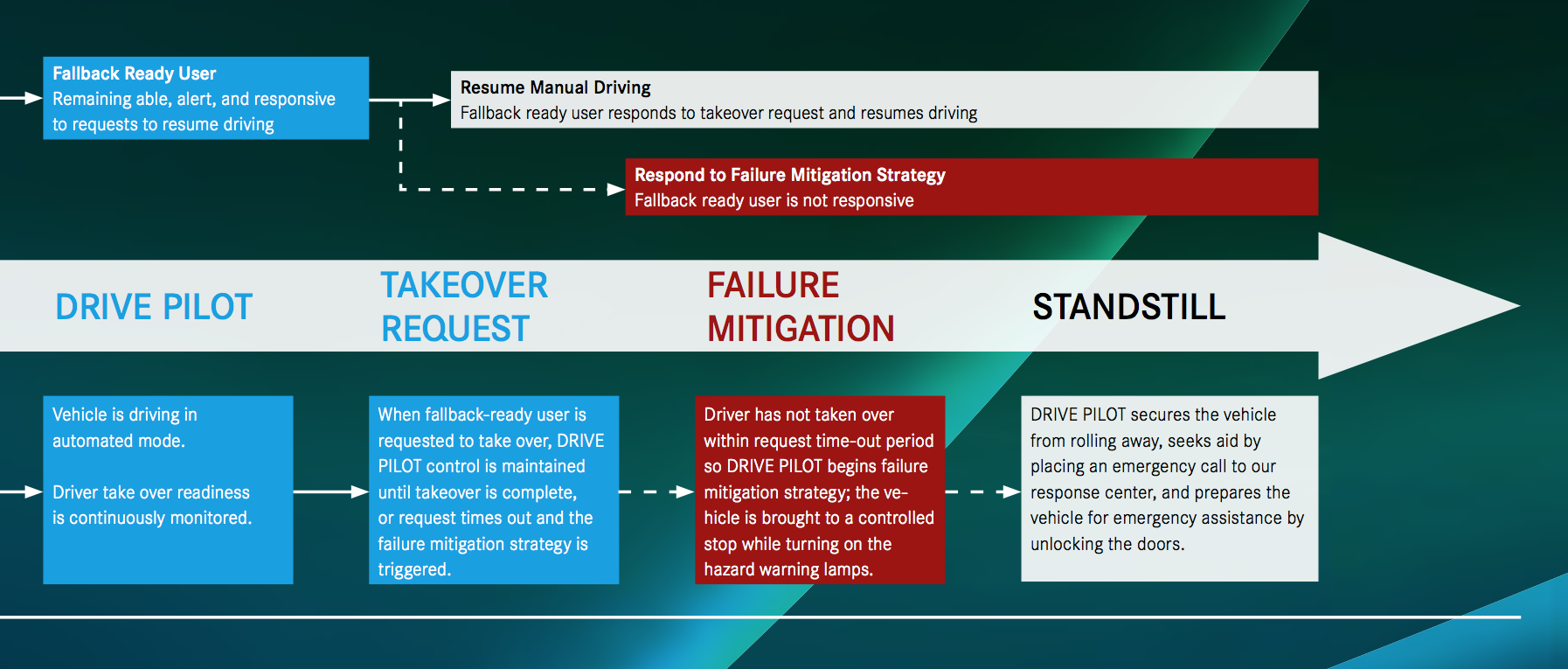
Here's what Drive Pilot does in situations where it can no longer reliably and safely pilot the vehicle and needs the driver to take over, but the driver does not respond:
Although the fallback-ready user is expected and obliged to resume driving without un- due delay if requested to do so by DRIVE PILOT, should s/he fail to do so DRIVE PILOT will automatically bring the vehicle to a controlled stop while maintain- ing its crash avoidance capabilities. Hazard warning lamps are automatically turned on during a controlled stop maneuver and, if necessary, emergency assistance is summoned and the vehicle is prepared for emergency assistance by unlocking the doors.
So, basically, the car just stops in its lane, and turns on the hazard lights.
This is not good enough.
I mean, sure, it's better than, say, the car crashing into a ravine, but the end result still is a car parked in a lane of active traffic on a highway, which is, objectively, a terrible idea.
I reached out to Mercedes-Benz to confirm all this, and this was what I was told:
When the vehicle approaches the end of a route section that is suitable for the DRIVE PILOT, for example a tunnel, or if other conditions change, perhaps the weather or the traffic situation (for example when a tailback begins to flow freely), the driver is prompted in good time to retake control. Fundamentally the driver must remain ready to take control and be able to continue driving the vehicle manually within ten seconds – sleeping, looking to the rear for extended periods or even leaving the driver's seat are therefore not possible. To ensure that the driver is able to take control, the cameras of the driver display and MBUX Interior Assist monitor movements of the head and eyelids.
If the driver fails to take back control even after increasingly urgent prompting, e.g. owing to a severe health problem, the DRIVE PILOT brakes the vehicle to a standstill in a controlled manner and with suitable deceleration. At the same time the hazard warning system and, once the vehicle has come to a standstill, the Mercedes-Benz emergency call system are activated and the doors and windows are unlocked, to make access to the interior easier for any first responders. Naturally the driver can also deactivate the DRIVE PILOT at any time without any prompting by the system. This is done via the steering wheel buttons, or by manually intervening in the vehicle's control functions.
On suitable motorway sections and where traffic density is high, the DRIVE PILOT can offer to take over the driving, initially up to the legally permitted speed of 60 km/h (37 mph).
So, that's pretty much what all the other materials were saying too, though now we know that the driver "must remain ready to take control and be able to continue driving the vehicle manually within ten seconds," which isn't an awful lot of time, especially if you really haven't been paying attention to what's going on out the windows.
Is there any situation where you might be driving along a highway and feel tired or notice a problem with your car, so you just decide to stop right there in the lane and turn on your hazards? No.
Hell, no, even. If there's any way at all you can get off the highway and onto a shoulder, you do that, because you're not an idiot who thinks having a truck full of produce rear-end you at 60 mph seems like a pretty cool way to kill an afternoon.
But that's exactly what this Level 3 system will do in situations where, after potentially many boring yet comfortable hours of the car driving itself, it all of a sudden decides it needs you to take over.
And the reasons it might need you to take over could be any number of reasons, including poor weather conditions (Mercedes-Benz has not approved the system to be used in the rain), a stretch of worn road markings, or, perversely, the system not being able to confirm that you're awake and potentially able to take over, which means that if the driver-facing cameras think you're asleep, after attempts to wake you, the car will come to a halt.
Now, this early implementation that's limited to 37 mph likely means that a car stopped in a lane will likely just be a pain in the ass for everyone around them as opposed to a possible death sentence (though there's still plenty of opportunity for crashes with a stopped car in a traffic lane), but once this system is approved for highway speeds, then there's real danger.
This car is a top-end Mercedes-Benz with lots of power—it's going to be in the passing lane. So when Drive Pilot is okayed for high-speed travel, and the system needs to hand off to a driver that's sleeping, it'll be stopping there, on the highway, in the passing lane.
Why would this be acceptable for anyone?
I get that actually having a semi-automated vehicle be able to get off the road and onto a shoulder—if one is available—is a really, really difficult problem. In fact, I don't think it can really be solved by individual carmakers themselves without infrastructure assistance and cross-brand collaboration.
Part of the problem has to do with how we're defining Level 3: unless L3 includes provisions to move the car out of active traffic lanes, it's effectively garbage. I had foolishly assumed that everyone understood this, but I was clearly very wrong.
What I'm not wrong about is that parking a car with a unconscious, drunk, sleeping, really into that last episode of Loki or otherwise incapacitated driver right there in a lane of traffic is an absolutely terrible idea, and no one who drives on public roads should accept it.
What if these half-ass L3 systems become common? On a four-lane highway (two in either direction), if two L3 cars are side-by-side and both encounter issues that require takeover (not unlikely at all, since these issues could be related to weather or road conditions) and both drivers are asleep or otherwise non-responsive, then congratulations, two cars have just blocked off all traffic on that highway.
In best-case scenarios, that's at low speeds, with low-speed traffic all around. Far worse is high-speed traffic and an L3 car stopped just over the crest of a hill, invisible until a highway-speed car comes over that crest, not expecting some idiot to just be parked in a lane.
I think any L3 certification should be held until carmakers can show workable get-off-the-road solutions. I know it's hard, and will delay L3 progress.
I also know I don't care.
These carmakers have more money than God's lawyer's brother-in-law that's skimming off the top. They have hordes of talented engineers. It's time to make them do something right, even if they have to work together. I don't care if it's expensive or prevents them from launching an exciting new ad campaign. This is something they need to figure out.
Until AVs can get out of active lanes of traffic when impaired, none of this other bullshit matters. This particular AI skill is needed for all higher levels of driving autonomy, and for Mercedes-Benz to sell a car with a system that literally lets you zone out completely when the car is driving, but has no way to get the car out of harm's way if the driver can't get in control in time is just a recipe for trouble.
It's not just Mercedes-Benz; Audi and Honda have also announced Level 3 systems, and none of them are able to get their cars off the damn road, either.
The whole point of autonomy—or at least a key point—is safety. Parking a temporarily non-operational car in an active lane of traffic is the opposite of safe, and I don't care how bright your hazard lights are.