I Dispelled A Big Tesla Autopilot Myth By Running Tests On A Tesla Model Y
I've heard misinformation about this repeated many times, so I drove behind a Tesla Model Y to set the record straight.

I'll admit that no matter how many times I hear this particular myth about Tesla Autopilot or Full Self-Driving (FSD), I'm always surprised. I'm surprised because it's something that Tesla itself makes very clear in its documentation, but somehow the truth hasn't gotten to many Tesla owners. The myth has to do with what a Tesla on Autopilot or FSD does if it does not get a response from the driver. So, to settle this once and for all, I tested it, and videoed what happened.
Here's what the myth is: there is an alarmingly high number of Tesla owners who believe that, while using Autopilot or FSD, if a driver does not respond to the vehicle's repeated prompts to pay attention and take hold of the steering wheel, the car will put on its hazard lights and carefully come to a stop on the side of the road, out of the active traffic lane.
I've heard this from many Tesla owners and fans; when I was on the YouTube show of a particularly rabid Tesla fan, he stated this belief, for example. As much as I hate to give him more YouTube views, I think it's worth doing this one time, since my whole point here is that he's wrong:
"They don't just stop in the middle of the road. No, they pull over to the side of the road," the rabid Tesla fan says in the clip. I've heard similar remarks from many others who are generally smart and well-informed people, including, most recently, a journalist and Tesla-owner at the Polestar 2 launch event earlier this month.
That journalist—again, someone actually in the business of Knowing Things About Cars—insisted to me that Teslas pull off the road, out of an active traffic lane, when they have to disengage Autopilot due to a lack of driver response.
I even showed this journalist the part of Tesla's own owners manual where the company makes it pretty damn clear what its cars will do in this event:
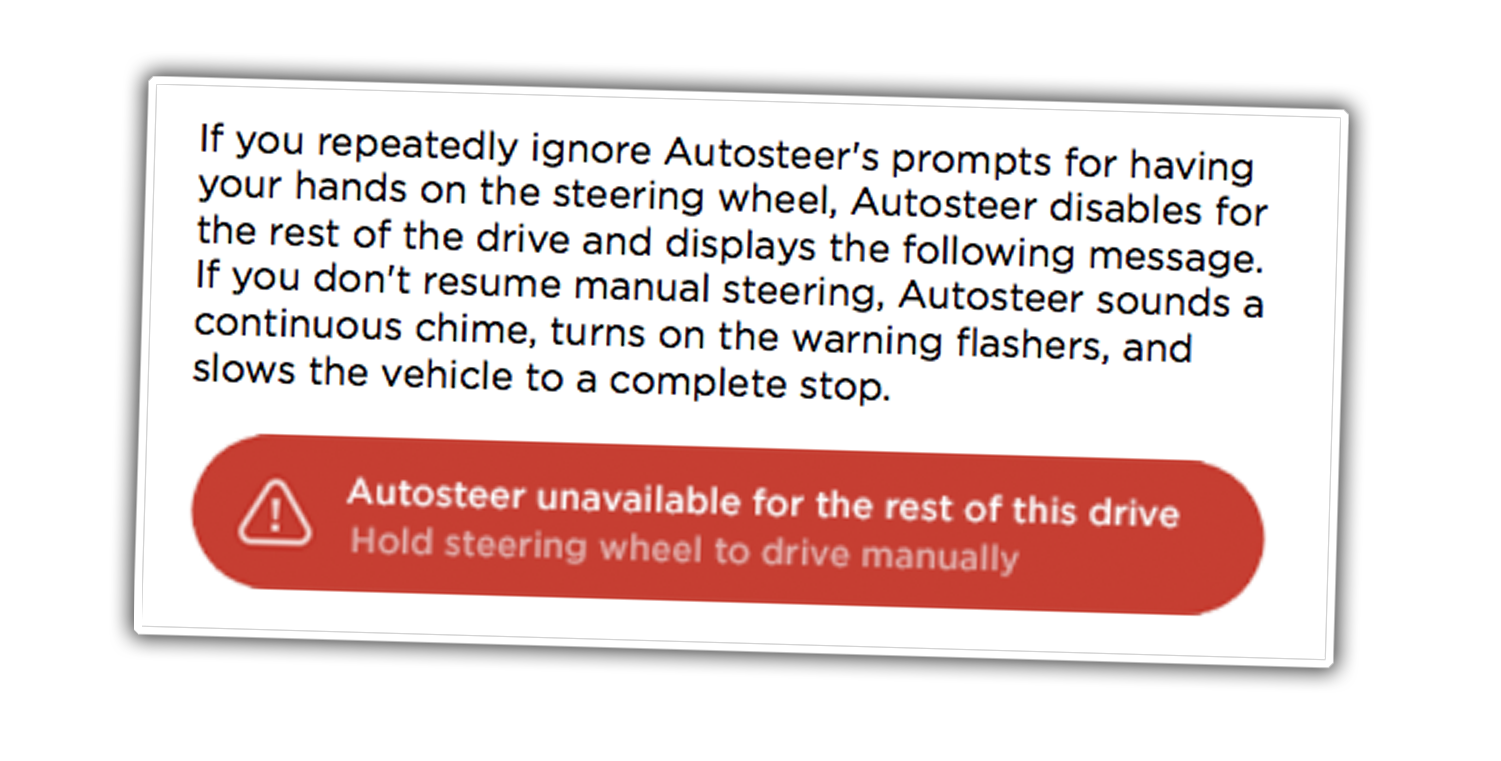
We can't fault Tesla here; that's a very clear explanation: the car chimes, turns on the hazard lights, and stops. That's it. It doesn't leave the lane of traffic. If you have a stroke while in your Autopilot-active Tesla doing 80 in the fast lane of the highway, that fast lane is exactly where your car will come to a stop, a nice blinking target for getting rear-ended by the next car that comes speeding along.
Even after seeing the owner's manual, the journalist still didn't believe me, but he did agree to do a test himself at some point. I got tired of waiting, which is why this article exists.
(That journalist also took a goofy picture of himself fake-choking me to show to his Tesla friends, which I thought was kinda weird, but, whatever. I'm not here to kink-shame).
Anyway, for my own tests, I reached out and found a happy, satisfied Tesla owner who was willing to help. This owner has both a Model 3 and a Model Y and a very cute dog named Bodhi. We only used the Model Y in this test, though Bodhi was present.
Because this test involves stopping in the middle of an active lane of traffic, and since no one involved wanted an accident, we did the run late at night, on as empty a stretch of road as possible. As a result, this footage isn't exactly exciting, but that's hardly the point.
I mounted a camera in the Model Y pointed at the windshield and main display so you can see the "Autopilot" system requesting the driver take control, then flashing and beeping, after which you can see the disengagement display.
I also shot the car from my Pao, driving behind the Tesla, so you can see the Tesla come to a stop from the outside.
Okay, here's the inside camera showing one disengagement:
...and here it is from behind:
We did two runs, with the same effect both times. The road's shoulder was grassy, but a car could easily have pulled off onto it. We decided not to do our video on the highway due to the amount of traffic and the inherent danger of stopping in an active highway lane. With that said, the Tesla's owner confirmed that he later tried the same test on a highway with a paved shoulder lane, and got the same result.
If you don't believe that, here's a video showing a Tesla Model S stopping in the middle of the road after detecting an unresponsive driver (a move that may have saved this driver's life, it's worth noting):
I want to be clear that while I'm singling out Tesla in this test, mostly because it is about Teslas that I usually hear this myth, every single carmaker that sells a Level 2 semi-automated system does not do anything any better.
Even Mercedes-Benz' alleged "Level 3" system just stops in an active traffic lane, and I wrote about how inadequate this solution is at length. A Mercedes PR person told me there were regulations in place that prevented vehicles from leaving the traffic lane, and it seems this is the regulation in question: UN ECE Regulation 157 on Automated Lane Keeping Systems (ALKS) — specifically, these parts:
5.1.1. The activated system shall exercise control over systems required to support the driver in resuming manual control at any time (e.g. demist, windscreen wipers and lights).
5.1.4. A transition demand shall not endanger the safety of the vehicle occupants or other road users.
5.1.5. If the driver fails to resume control of the DDT during the transition phase, the system shall perform a minimum risk manoeuvre. During a minimum risk manoeuvre, the system shall minimise risks to safety of the vehicle occupants and other road users. 5.1.6. T
[...]
5.5.1 During the minimum risk manoeuvre the vehicle shall be slowed down inside the lane or, in case the lane markings are not visible, remain on an appropriate trajectory taking into account surrounding traffic and road infrastructure, with an aim of achieving a deceleration demand not greater than 4.0 m/s².
Higher deceleration demand values are permissible for very short durations, e.g. as haptic warning to stimulate the driver's attention, or in case of a severe ALKS or severe vehicle failure.
Additionally, the signal to activate the hazard warning lights shall be generated with the start of the minimum risk manoeuvre.
According to this, the defined "minimum risk manoeuvre" is just stopping right in the active traffic lane, which really doesn't strike me as being "minimum risk." If this is actually why no automakers are leaving the active traffic lane when they possibly could, then I think this regulation needs to be reconsidered.
It's not an American regulation, though, so it technically shouldn't be what's holding back cars in our market from getting out of the way, I don't think.
Stopping in an active traffic lane is never a good idea. On city streets, at low speeds, it's more of a traffic flow problem, but on highways or back roads or in situations where the car stops over the crest of a hill or around a turn it can very, very easily lead to crashes. It's worth noting that it does happen sometimes when there's gridlock on a freeway (an iconic example is of course LA's 101), but it's a bit easier to see a pack of 1,000 cars stopped than just one with its flashers on.
Would you feel comfortable just stopping in your lane on a highway, and sitting in the car with the hazards on? Hell no. It's a terrible idea.
If we're going to continue selling cars with inherently-flawed Level 2 systems that demand drivers remain vigilant while not really driving while also not-not driving, then at the very least the cars need to be able to get out of the way of traffic if a driver isn't responsive.
Just so it's clear, I do think that having the car come to a safe stop automatically is better than it, say, not stopping and crashing. Of course it's better. And, on most city streets and low-speed situations, it's fine. But on a highway, while it's better than doing nothing, it's just not better enough. If you don't believe me, just think one more time how you'd feel parked in a lane on a major highway. It's not good.
We've seen people abuse L2 systems over and over again. We know people are not always able to be relied upon to keep alert when the machine is doing much of the driving. We know one of the big advantages of these systems is their potential to keep people alive when they have a medical issue behind the wheel.
So why not make sure that the way this disengagement happens ends up with the car out of harm's way?
It's not an easy problem to solve, and, worse, it's not a sexy one. It might take cooperation, it might require infrastructural help. I don't really know.
But what I do know is that it's important to solve this, likely more important than making these L2 systems better at driving. This should be the next major priority: Whenever possible, make all semi-automated systems get out of the way when they need to disengage.
And, as a reminder to anyone who still believes otherwise (and I'll admit that, for many who have watched Tesla "Autopilot" videos, this may have been obvious), watch those videos again. Teslas just stop right in their lane. They do not pull off the road. Nobody's car does. Do not think this is even an option.
Are we all clear here? Am I never going to have to hear this bullshit again? Good.