These Tiny Robots Are Faster Than A Bugatti Chiron
OK, they’re comparatively faster than a scaled down Bugatti Chiron, but still.
There have been some fascinating developments in the world of tiny robots recently. We've already had the world's smallest remote control robot, and now a group of scientists has created one of the fastest tiny robots of all time.
According to Ars Technica, a group of researchers at Johannes Kepler University (JKU) in Austria has been developing "soft robots" that can swim, jump and run at very high speeds.
The robots are constructed from a flexible material that can be programmed to change shape under certain conditions. As the shape changes, they can jump, run or swim at alarmingly high speeds.
In tests, the findings of which were published in Nature, the micro machines were able to propel themselves along at a steady 35 BL/s (body lengths per second) on a plane and 70 BL/s on a folded 3D surface.
For a creation that measures less than 1cm across (2/5 inches), that equates to a speed of about 1.57mph. And that doesn't sound very impressive.

But speed is all relative, and being able to travel 70 times your body length in a second is pretty rapid. To put that into perspective, a Bugatti Chiron with its top speed of 273mph and 180" length travels at the equivalent of 26 BL/s (body lengths per second), less than half the speed of these 'bots.
A Boeing 747 has a max speed of 614mph, but it's much larger size means that with some quick math we can see that it only manages a lousy 3.89 BL/s.
In fact, if you want to come close to the impressive performance of the tiny robots, you've got to look to the world of motorbikes. Maybe something like the bonkers Marine Turbine Technologies 420-RR, which is powered by a gas turbine engine and can hit speeds well above 250mph? That impressive speed and the bike's 68" wheelbase means that it can hit 65BL/s. Close, but no cigar.
So, we've proven that the robots are relatively speedy. But, how do they work?
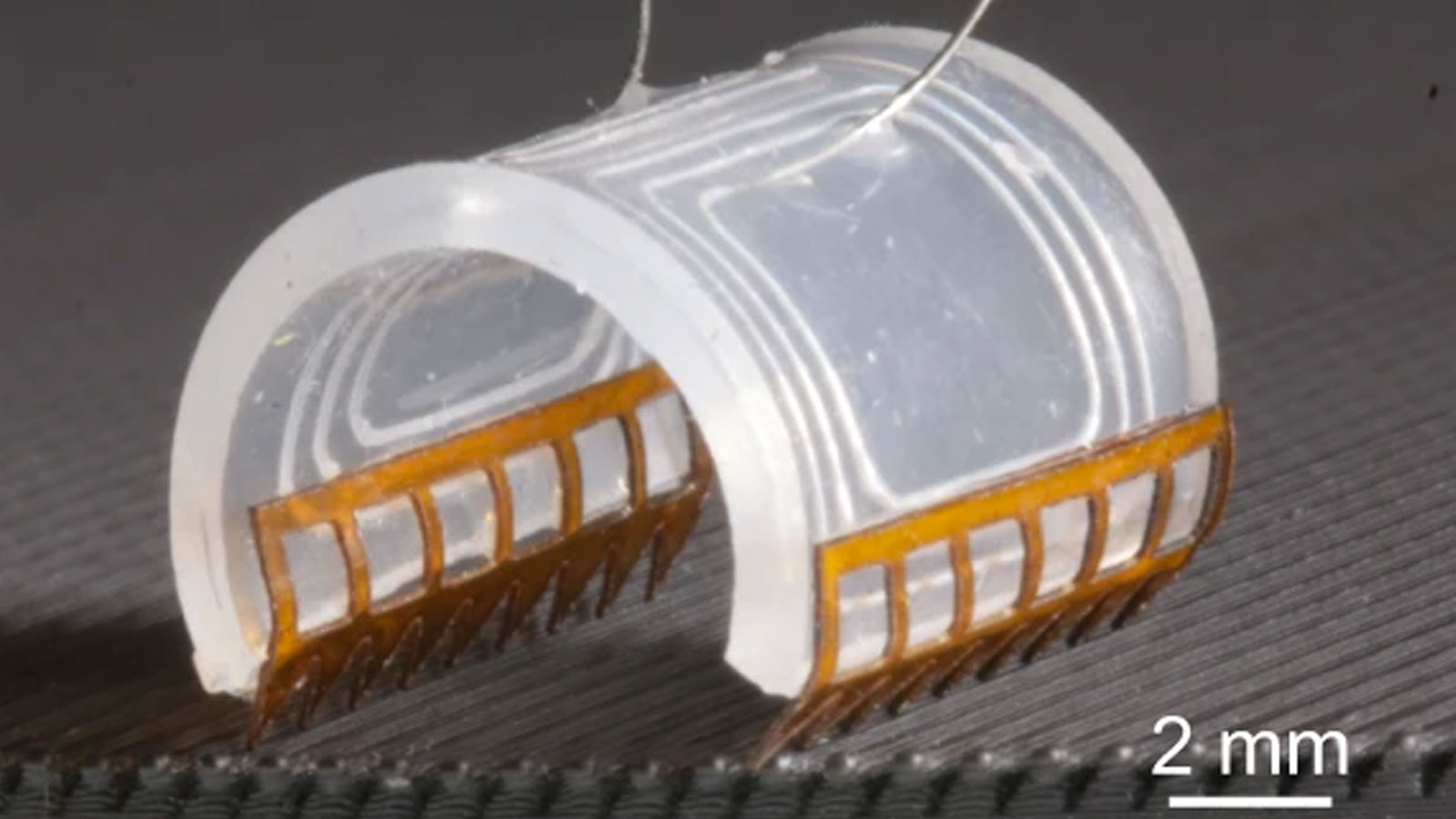
Well the machines, which weigh just 180mg (about 0.00635 oz) are 3D printed using a liquid metal alloy called galinstan. Most robots as small as this, such as the tiny flying machines, are made from silicon-based polymers. But researchers used this metal alloy as it was highly conductive, making it "useful for building soft and deformable coils."
That metal is shaped into a coil, which is then surrounded by an elastomeric shell, which houses actuators to control its movement. Feet are then attached at each end, and these can be specifically designed to suit the task or surface at hand.
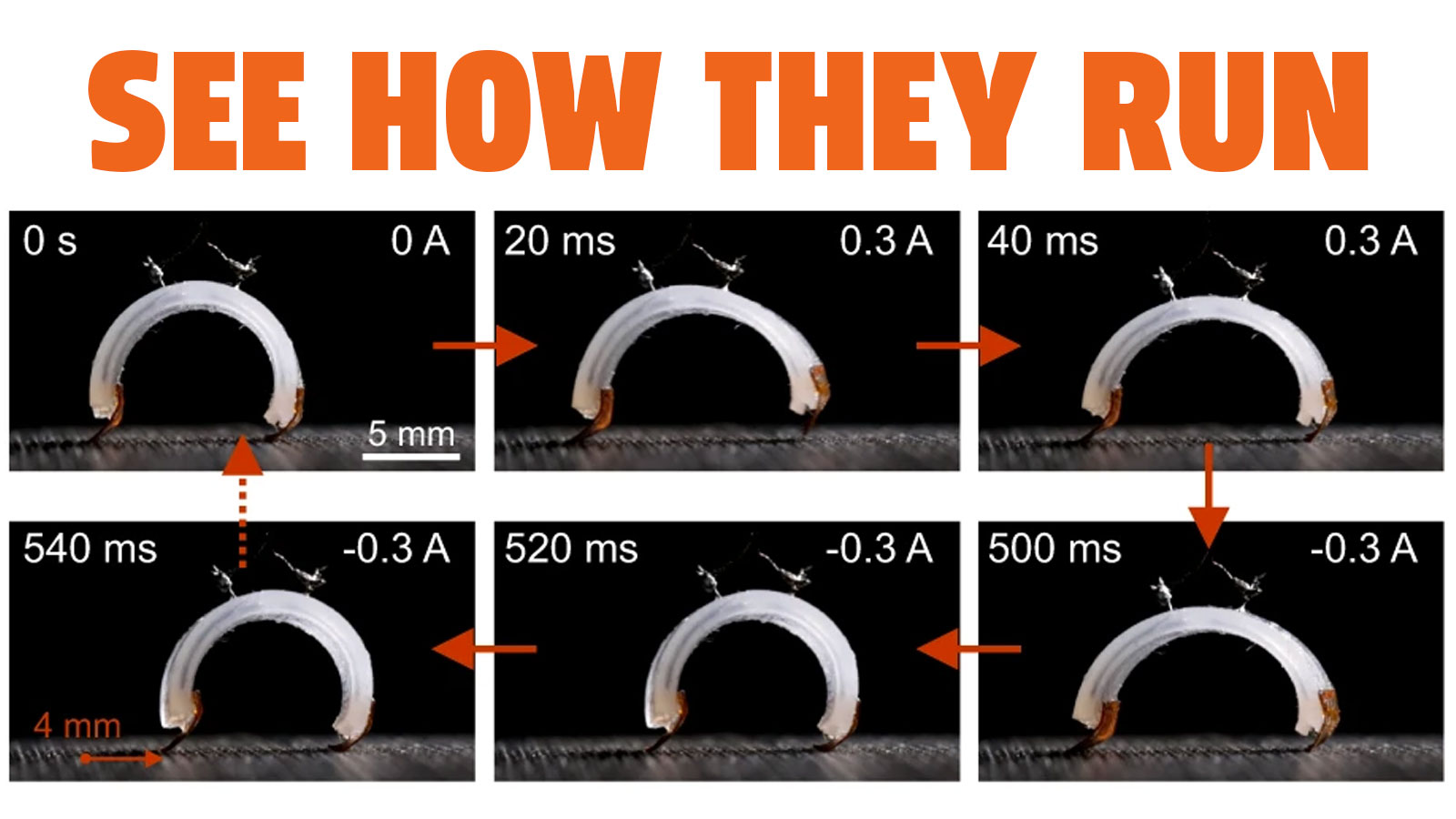
In their resting state, the robots are curved over in a 'C' shape, but when they move they stretch out to almost flat. This propels them forwards, before they retract back for the landing.
The actuators that manage this movement are magnetically controlled. This means that researchers can trigger the movement using a magnetic field.
There's still work to be done on the micro machines. But, researchers hope that the work they are doing could pave the way for bigger, faster robots in the future. The speed found in these creations could also apply to other tiny robots currently being developed to carry out lunar research or clean up ocean waste.